Yavuz Ertuğrul
Robotics Software Engineer
LinkedIn | Personal Website/Portfolio/Blog | GitHub | All Other Links
Skills
- ROS/ROS2, Docker, Python, ML, Linux, Matplotlib, Scikit-learn, OOP, Bash Scripting, QT, Scrapy, Pandas, NumPy, Seaborn
Professional Experience
Robotics Software Engineer at Kindhelm (İstanbul, Turkey)
April 2024 - Present
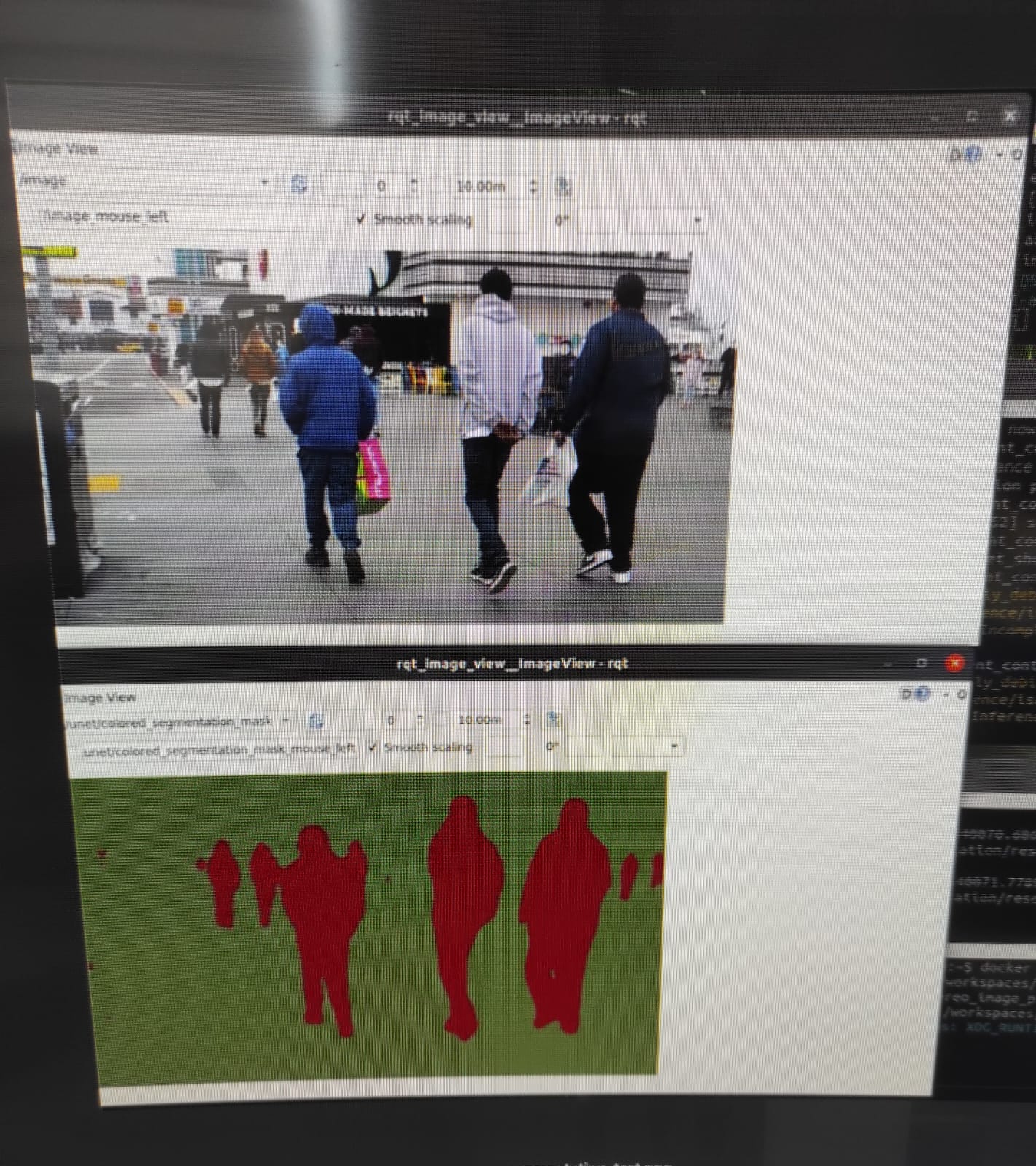
- AI and Robotics Development on NVIDIA & Embedded Platforms: Developed and deployed AI-powered robotic applications using Jetson Orin NX/Nano, custom NVIDIA-based boards, and Quectel-based edge devices. Fine-tuned AI models for real-time inference and deployed them directly on Myriad Vision Processor (1.4 TOPS), achieving 4–5 ms object detection latency without a host PC. Conducted field tests across varied embedded platforms, focusing on object detection, ORB-SLAM2/3, and Visual Positioning Systems (VPS).
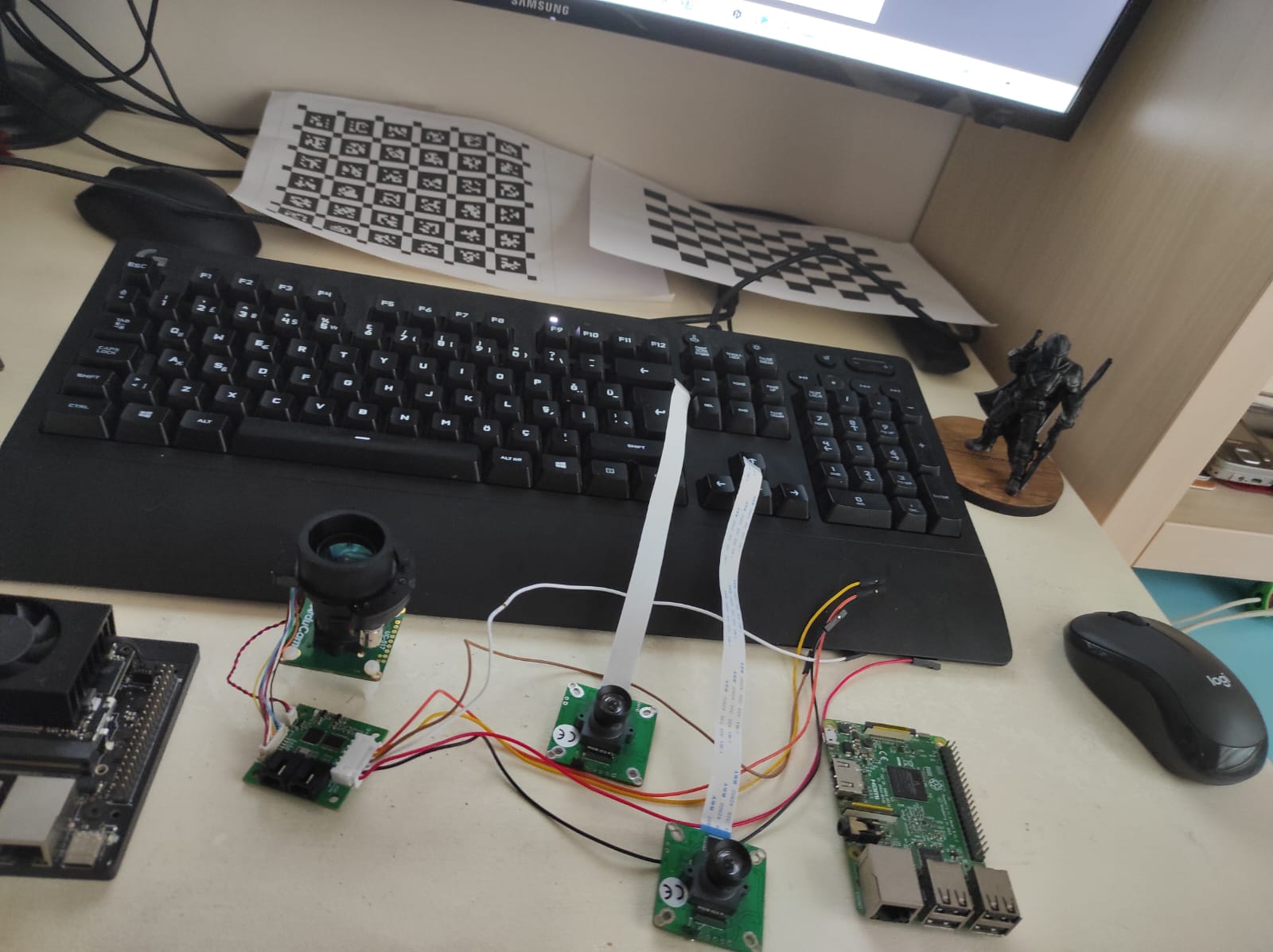
- Sensor Fusion and Temporal Calibration: Integrated and calibrated camera and IMU systems (AR0234,IMX477, RealSense D435i, Velodyne LiDAR) for robotics applications. Achieved sub-millisecond synchronization using ROS2-based pipelines (kalibr, ros1 bridge, custom camera-IMU sync tools), enabling reliable sensor fusion and motion tracking.
- ORB-SLAM and Spatial Mapping: Applied ORB-SLAM2 and ORB-SLAM3 in robotics projects for real-time localization and mapping. Generated custom datasets using Oak-D cameras and evaluated SLAM performance on edge and embedded devices. Tuned pipeline parameters and validated results across simulation and real-world scenes.
- ROS/ROS2 Framework: Created and maintained ROS/ROS2 packages, using tools like isaac_ros_argus_camera, image_proc, v4l2_camera, and ros1_bridge. Integrated SLAM and perception stacks within ROS2, ensuring synchronized operation and effective data routing across components.
- GUI-Free Edge Deployment and Remote Ops: Operated headless devices via SSH for development and debugging. Designed web-based dashboards on local networks to stream outputs and visualize inference results in real time when onboard UI was unavailable, facilitating collaboration and testing.
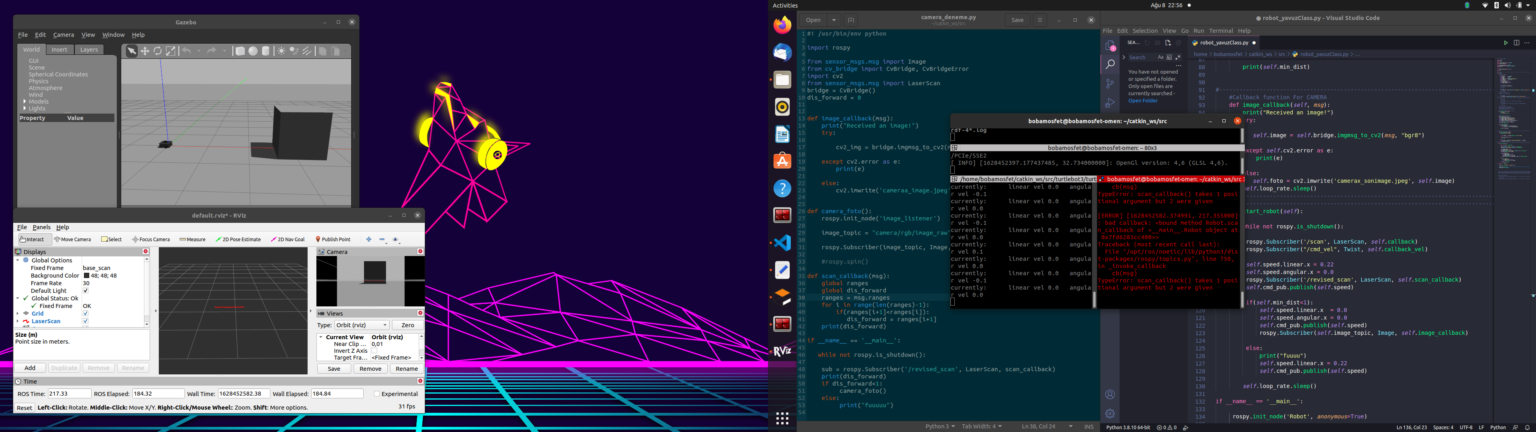
- Simulation and GUI Tooling: Simulated robotic systems in Rviz2 and Gazebo, and built graphical tools using PyQt5 and Leaflet for visualization and command. Integrated OpenStreetMap to support VPS-based navigation systems.
- Docker and Linux: Used Docker to ensure consistent environments across diverse Linux targets, including embedded boards. Skilled in debugging Linux-based services and pipelines. Experienced in WSL2 and native Linux, enhancing portability and developer efficiency.
- Programming Skills (Python, C++): Developed robotics modules, synchronization tools, and SLAM utilities in Python and C++.


Robotics Application Engineer at ACROME Robotics (Istanbul, Turkey)
February 2023 - October 2023
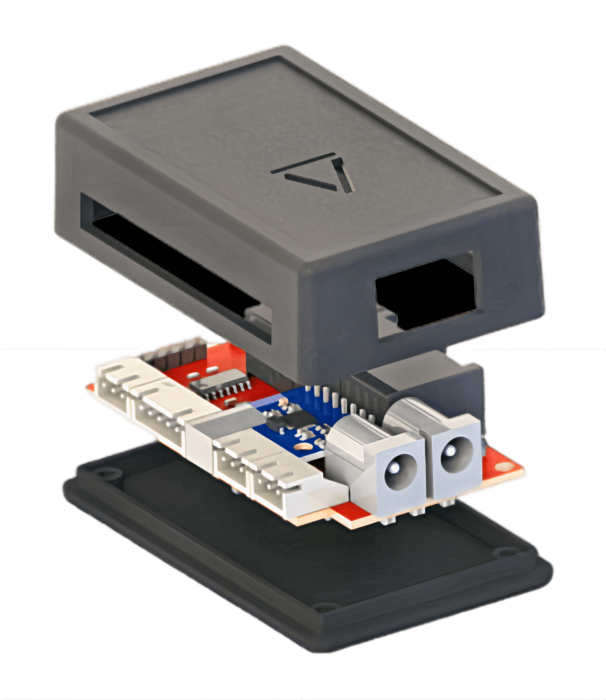
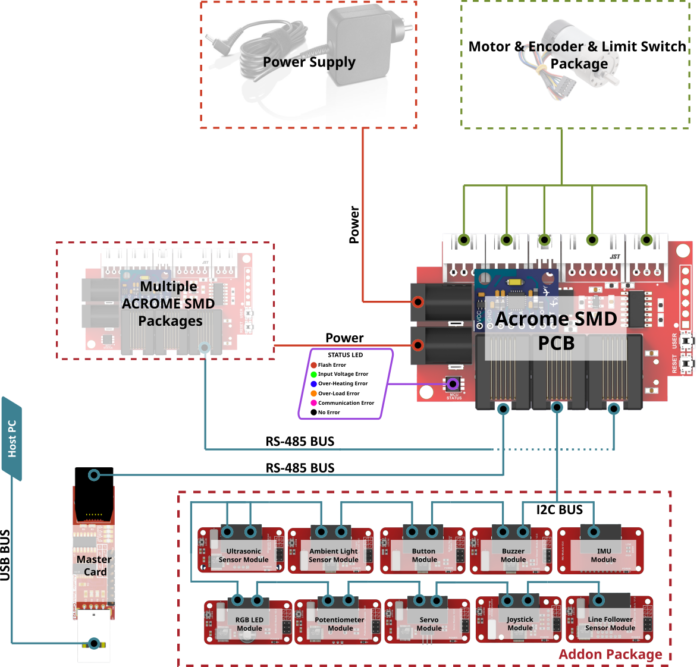
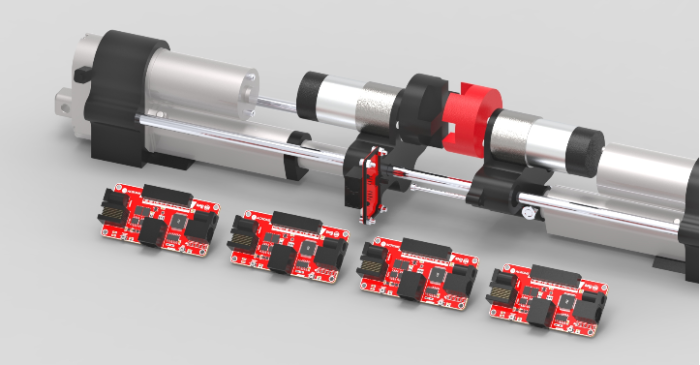
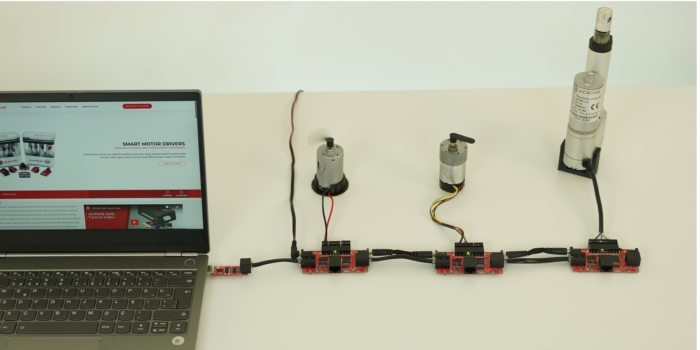
- Responsible for product development & process of SMD (Smart Motor Driver) family. Our first R&D device which is a smart motor driver.
- Responsible for GUI development with Python for SMD to manipulate, control, analyze, and observe our motors and to use specific applications (e.g., sync motor driving application).
- Getting familiar with embedded-side protocols like RS-485, I2C, sensors, and control theory, etc.
- Responsible for ROS & Python development/configuration of our products. Familiar with monolithic structure, refactoring, clean code, and keeping up to date with the embedded side, etc.
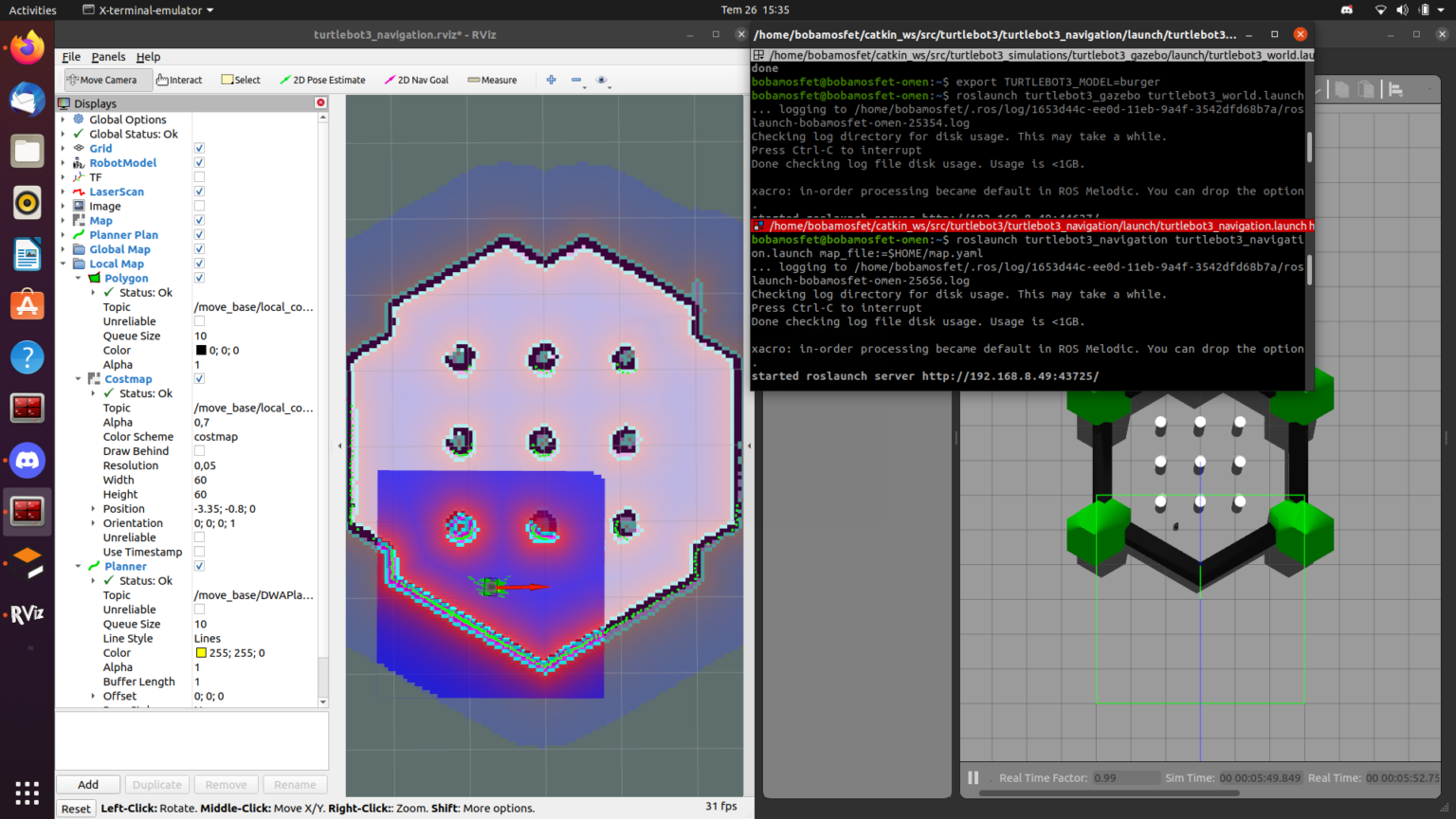
- Worked with our mobile robot equipped with Lidar. Developed/experienced SLAM mapping, obstacle avoidance algorithms in real life.
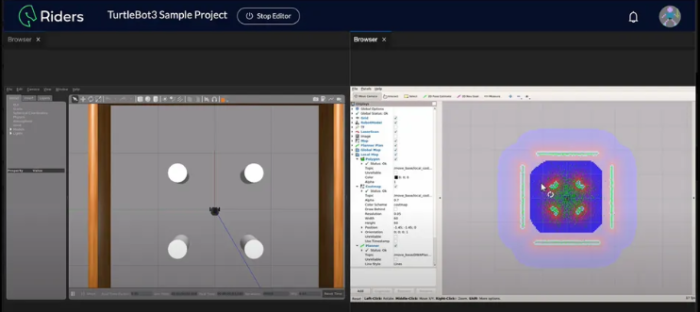
- Learned AWS environment to control/configure our physical mobile robot through our subsidiary company riders.ai's web-app, virtual robotic simulation environment. Developed a docker image using gzWeb, Eclipse Theia, and learned beginner-level Docker usage during the process.
- Responsible for content side (user manual, growth marketing, design, analysis process), created how-to-use videos, wrote technical blog posts related to our products, especially with SMD.



Research & Development Intern at ACROME Robotics (Istanbul, Turkey)
July 2022 - August 2022
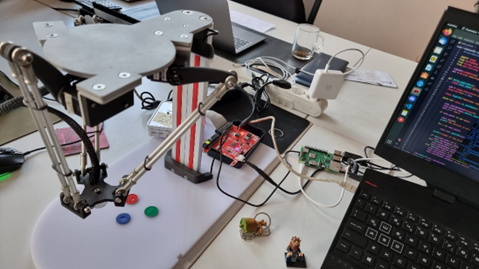
- Worked with Stewart Pro 6-DOF parallel robot used for positioning and motion control in professional photography, quality assurance positioner, and calibration applications. Also worked with Delta Robot, a 3-DOF parallel robot used for pick & place, robotic surgery, harvesting, and welding.
- Gained experience in image processing with OpenCV, inverse kinematics, Linux environment, connections and permissions, bash scripting, embedded software development, SSH, Acrome controller, Raspberry Pi, MyRIO devices, ROS framework, and Python.
Robotics Intern at Inovasyon Mühendislik Ltd. Sti. (Eskisehir, Turkey)
July 2021 - August 2021
- Developed embedded programming skills using ROS (Robot Operating System) framework, RViz, Gazebo, and Python, and learned Linux operating system and its distribution Ubuntu.
- Programmed an obstacle avoidance robot using Python, ROS, and object-oriented structure.
Developer Experiences and Evangelism Intern at Microsoft (Istanbul, Turkey)
July 2017 - August 2017
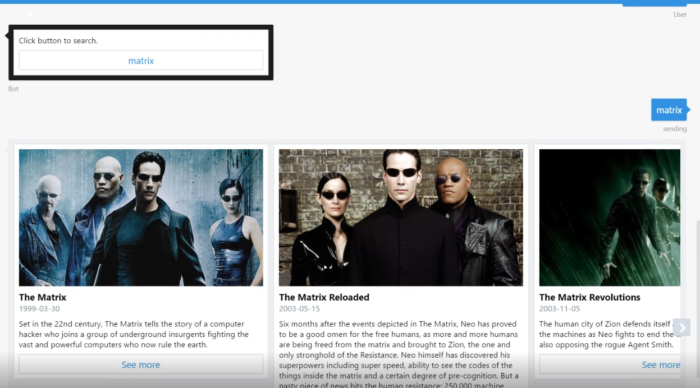
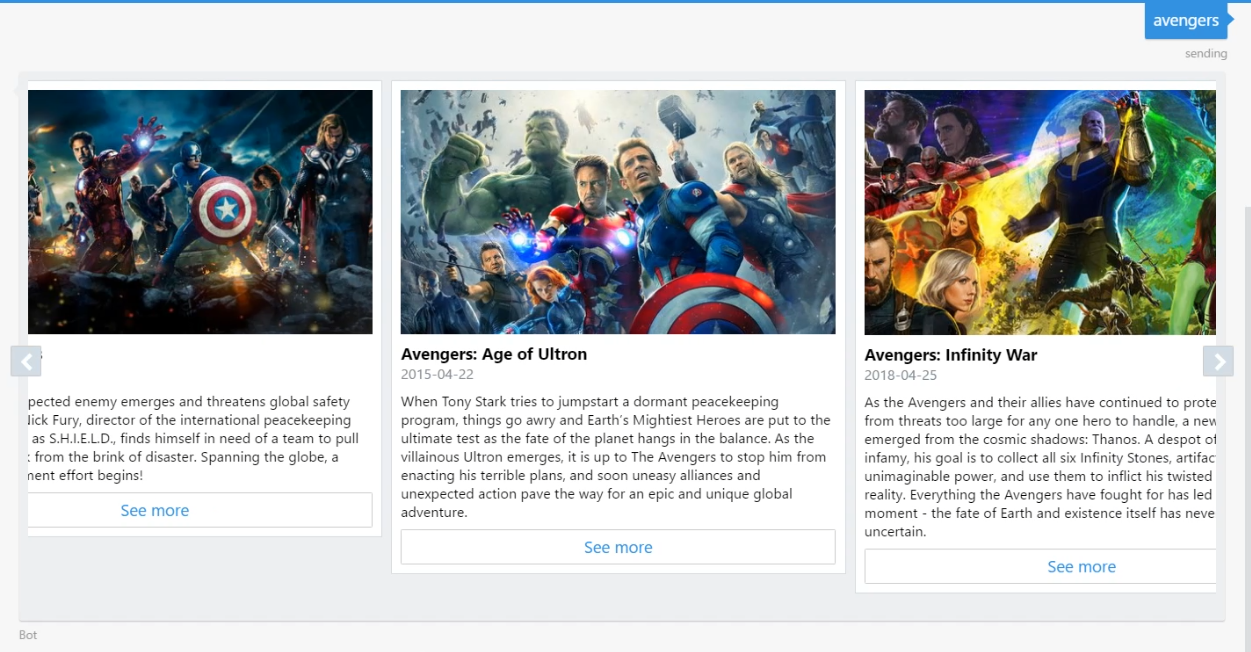
- Responsible for creating a project using Microsoft technologies and services (e.g., Azure, Chatbot Framework, Cognitive Services).
Tech Author at Dijitolog (product.blog) (Istanbul, Turkey)
February 2017 - June 2017
Education
BS Electrical and Electronics Engineering
Orta Doğu Teknik Üniversitesi (2023/July)
Honors and Awards
- Honor Student of the Spring Semester of the Academic Year 2020-2021 at Orta Doğu Teknik Üniversitesi.
Voluntary Work
- IEEE METU: Trainer, CS(Member), PES(Member), RAS(Chair), AESS(Chair).
- IEEEXtreme 11.0 Student Ambassador, Career and Management (Member).
×
![]()